
Extreme Perception
My research seeks to improve the performance of computer vision in extreme environments by understanding and exploiting the physics of light transport. It is well-known… Read More »Extreme Perception
My research seeks to improve the performance of computer vision in extreme environments by understanding and exploiting the physics of light transport. It is well-known… Read More »Extreme Perception

Skylights are recently-discovered “holes” on the surface of the Moon and Mars that may lead to planetary caves. These vast, stadium-sized openings represent an unparalleled… Read More »Planetary Skylight and Cave Exploration

Many types of imaging and range sensors exist on the market. Manufacturer specifications are often non-comparable, collected in ideal settings, and not oriented to robotics… Read More »Sensor Characterization

Current robotic maps are limited by decades-old range sensing technology. Only multisensor (LIDAR, camera, RADAR and multispectral) approaches can provide the density and quality of… Read More »Multi-sensor Fusion for Navigation and Mapping (2009-2014)

I developed several novel sensors for mapping and imaging. My work on VIPER resulted in the first space-qualified LED lighting system for rover navigation (active… Read More »Novel Optical Sensors
Humans are consumers of 3D models for training, oversight, operations and presentation. My research investigated new methods for immersive display that enhanced these tasks. Approaches… Read More »Model Visualization (2009-2014)

I supported ongoing research in lunar robotics at CMU. I led automation of RedRover, a prototype equatorial rover designed to win the Google Lunar XPRIZE,… Read More »Commercial Lunar Robotics (2008-2011)

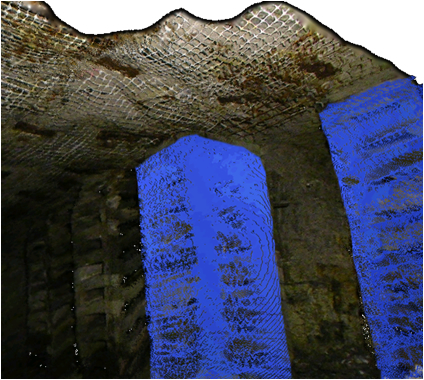
Robots are poised to proliferate in underground civil inspection and mining operations. I took over development of the CaveCrawler mobile robot, which was a platform… Read More »Subterranean Mapping (2007-2012)

I developed robots for inspecting hazardous and access-constrained underground environments. The MOSAIC camera is a borehole-deployed inspection robot that generates 360 degree panoramas. MOSAIC captures… Read More »Borehole Scanning and Imaging (2006-2009)

The Human Odometer was a wearable personal localization system for first responders and warfighters. The key idea is that real-time pose and activity information for… Read More »Human Odometer (2005)